题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
非线性系统结构如图7-11所示。(1)在同一坐标系里绘制线性部分的Nyquist曲线和非线性环节的负倒
非线性系统结构如图7-11所示。
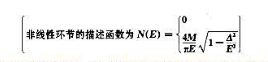
(1)在同一坐标系里绘制线性部分的Nyquist曲线和非线性环节的负倒描述函数曲线草图;
(2)由描述函数法分析系统的稳定性;
(3)在e-e平面绘制该非线性系统的相平面草图;
(4)由相平面分析法分析系统的稳定性。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
非线性系统结构如图7-11所示。
(1)在同一坐标系里绘制线性部分的Nyquist曲线和非线性环节的负倒描述函数曲线草图;
(2)由描述函数法分析系统的稳定性;
(3)在e-e平面绘制该非线性系统的相平面草图;
(4)由相平面分析法分析系统的稳定性。
答案
 更多“非线性系统结构如图7-11所示。(1)在同一坐标系里绘制线性部分的Nyquist曲线和非线性环节的负倒”相关的问题
更多“非线性系统结构如图7-11所示。(1)在同一坐标系里绘制线性部分的Nyquist曲线和非线性环节的负倒”相关的问题
第1题
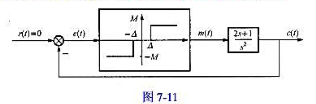
非线性特性如图2-7-20所示,试计算非线性特性的描述函数,并在复平面上画出负倒描述函数-1/N(x)。
第2题
某最小相位系统结构如图6-7(a)所示,G0(s)为受控对象的传递函数,图6-7(b)所示为该系统的开环对数幅频特性渐近线。试求:
(1)写出开环传递函数;
(2)计算该控制系统的相角裕量;
(3)写出串联校正装置的传递函数Gc(s),说明是什么型式的校正。
第4题
控制系统如图4-29所示,其中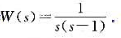
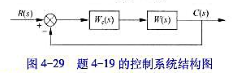
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当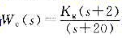 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
第6题
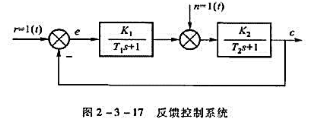
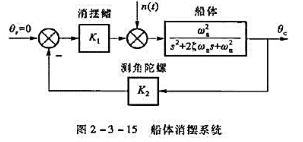
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第7题
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
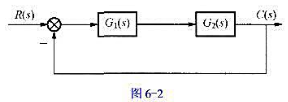
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
第8题
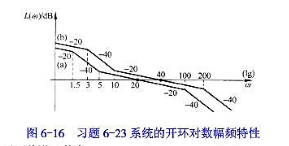
已知两系统(a)和(b)的开环对数幅频特性如图6-16所示,试问在系统(a)中加入什么样的串联校正环节可以达到系统(b)。
第9题
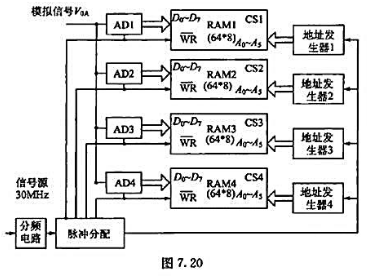
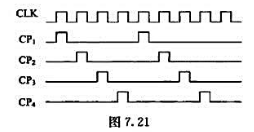
某系统为了提高采样速率,采用4片模数(全并行A/D)转换器构成并行交替式数据采集系统,原理框图如图7.20所示.系统信号源为30MHz的方波,时钟信号CLK为10MHz(要求占空比为1:1).并行交替式数据采集系统利用4片ADC轮流对同一个模拟输入信号进行采样,分别存人各路对应的64单元的存储器中,其对应各路AD所需的采样信号波形如图7.21所示,脉冲分配电路可用计数器+译码器构成.试根据系统设计参数要求,完成各部分电路的设计,器件任选.
(1)分频电路;
(2)脉冲分配电路;
(3)地址发生器电路设计;
(4)说明每个地址发生器所使用的时钟信号分别是什么?
第10题
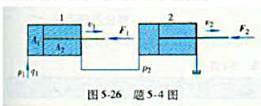
1)两缸承受相同负载时(F1=F2),负载和速度各为多少?
2)缸1不受负戟时(F1=0),缸2能承受多少负载?
3)缸2不受负载时(F2=0),缸1能承受多少负载?