题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反
控制系统结构图如图6-2所示,其中 ,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
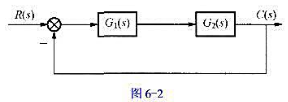
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反馈的校正方式,使时间常数T2诚小为原来的0.2,要求:
(1)画出校正后系统的结构图;
(2)确定位置反馈系数K;
(3)为了使校正后系统对于阶跃输入的稳态误差保持不变,K1应作何调整?
答案
 更多“控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反”相关的问题
更多“控制系统结构图如图6-2所示,其中,为了减少时间常数T2的影响,提高系统快速性,现采用位置反”相关的问题
第1题
控制系统如图4-29所示,其中
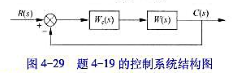
(1)当Wc=kg时,由所绘制的根轨迹证明系统总是不稳定的。
(2)当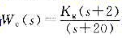 时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
时,绘制系统的根轨迹,并确定使系统稳定的Kg值范围。
第3题
已知系统结构图如图2-2-18所示。
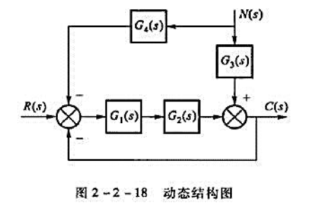
①求传递函数C(s)/R(s) ,C(s)/N(s)。
②若要消除N(s)的影响,C4(s) =?
第4题
某系统其结构图和开环幅相特性曲线如图2-5-20(a),(b)所示。图中
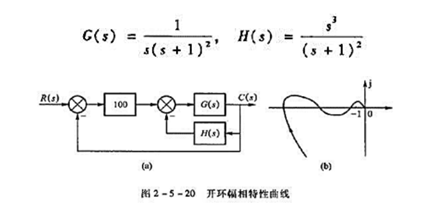
试判断闭环系统的稳定性,并确定闭环特征方程正实部根的个数。
第8题
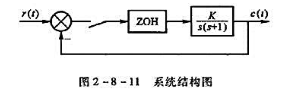
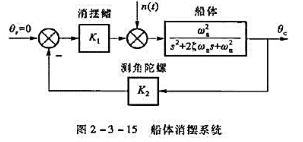
设船体消摆系统如图2-3-15所示。其中扰动n(t)为海浪力矩,所有参数中除K1外均为已知值。如果n(t)=10°·1(t).试求使稳态误差enm≤0.1°的K1值。
第9题
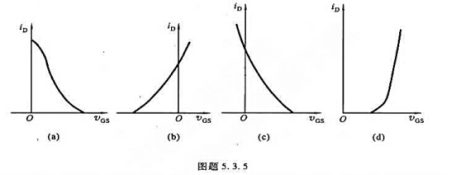
四个FET的转移特性分别如图题5.3.5a,b,c,d所示,其中漏极电流iD的假定正向是它的实际方向.试问它们各是哪种类型的FET?
第10题
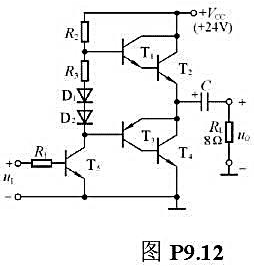
OTL电路如图P9.12所示.
(1)为了使得最大不失真输出电压幅值最大,静态时T2和T4管的发射极电位应为多少?若不合适,则一般应调节哪个元件参数?
(2)若T2和T4管的饱和压降|UCES|=3V,输入电压足够大,则电路的最大输出功率Pom和效率ƞ各为多少?
(3)T2和T4管的ICM、U(BR)CEO和PCM应如何选择?
第11题
请设计实现上述要求的控制算法流程图.