题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设R3的子空间试证α1,α2及β1,β2都是V的基,并求从α1,α2到β1,
设R3的子空间
 试证α1,α2及β1,β2都是V的基,并求从α1,α2到β1,β2的过渡矩阵。
试证α1,α2及β1,β2都是V的基,并求从α1,α2到β1,β2的过渡矩阵。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
设R3的子空间试证α1,α2及β1,β2都是V的基,并求从α1,α2到β1,β2的过渡矩阵。
答案
 更多“设R3的子空间试证α1,α2及β1,β2都是V的基,并求从α1,α2到β1,”相关的问题
更多“设R3的子空间试证α1,α2及β1,β2都是V的基,并求从α1,α2到β1,”相关的问题
第1题
第2题
设V是对于非退化对称双线性函数f(α,β)的n维准欧氏空间,V的一组基ε1,...,εn如果满足


则称为V的一组正交基。如果V上的线性变换 满足
满足

则称为V的一个准正交变换。试证:
1)准正交变换是可逆的,且逆变换也是准正交变换;
2)准正交变换的乘积仍是准正交变换;
3)准正交变换的特征向量α,若满足f(α,α)≠0,则其特征值等于1或-1;
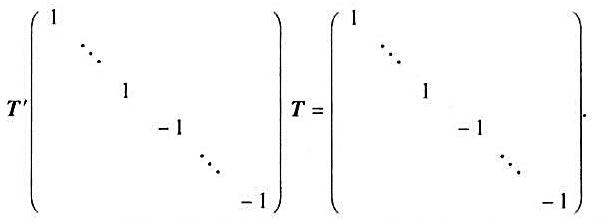
4)准正交变换在正交基下的矩阵T满足
第4题
设f(x)∈C[x],用f(x)表示将f(x)的系数换成它们的共轭数后所得的多项式,试证:
1)若 则
则
2)存在 使
使

第6题
第7题
 .
.
第8题
设 为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
为直角坐标系,又Pi(xi,yi,zi)(i=1,2,3)为不同的三点
l)确定线段P1P2的中点坐标:
2)若P1,P2,P3不共线,试证△P1P2P3的重心的坐标为
(注:设Pi(xi,yi,zi),i=1,2....n.则由坐标

所确定的点P称为Pi(1≤i≤n)的重心.)
第9题
第10题
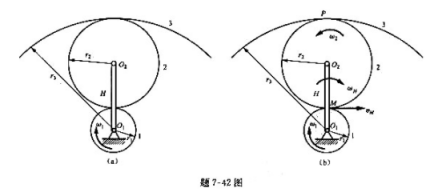
行星齿轮减速机构如题7-42图(a)所示。太阳轮1绕O1转动,带动行星轮2沿固定齿圈3滚动,行星轮2带动系杆H绕轴OH转动,从而实现了变速要求。已知各齿轮节圆半径分别为r1,r2。以及r3=r1+2r2,齿轮1和2的齿数分别为z1和z2,当齿轮1以角速度w1转动时,试求系杆角速度wH,以及传动比iH。
第11题

 是有这Sanger向量而成的线性空间p4的子空间。
是有这Sanger向量而成的线性空间p4的子空间。
(1)求以W为其解空间的齐次线性方程组.
(2)求以W = {ƞ+α|α∈W}为解集的非齐次线性方程组,其中η= (1, 2,1, 2。1).

 使得
使得
 使得
使得