题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
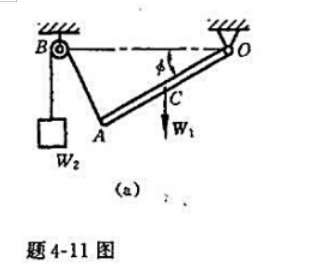
题4-11图(a)所示均匀细杆OA的重量为W1,可绕光滑铰链O转动。杆端连接细绳,细绳跨过光滑小滑
题4-11图(a)所示均匀细杆OA的重量为W1,可绕光滑铰链O转动。杆端连接细绳,细绳跨过光滑小滑轮B而悬挂一重物,其重量为W2。已知OA=OB=l,且OB成水平;滑轮尺寸略去不计,求平衡时细杆与水平线所成的角度φ,再设W1=3W2,试计算平衡时φ角的值。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
题4-11图(a)所示均匀细杆OA的重量为W1,可绕光滑铰链O转动。杆端连接细绳,细绳跨过光滑小滑轮B而悬挂一重物,其重量为W2。已知OA=OB=l,且OB成水平;滑轮尺寸略去不计,求平衡时细杆与水平线所成的角度φ,再设W1=3W2,试计算平衡时φ角的值。
答案
 更多“题4-11图(a)所示均匀细杆OA的重量为W1,可绕光滑铰链O转动。杆端连接细绳,细绳跨过光滑小滑”相关的问题
更多“题4-11图(a)所示均匀细杆OA的重量为W1,可绕光滑铰链O转动。杆端连接细绳,细绳跨过光滑小滑”相关的问题
第1题
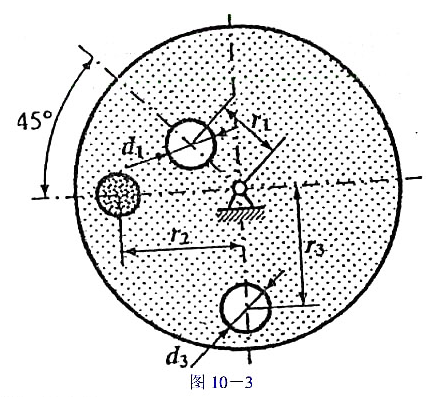
图10-3所示一均质钢圆盘.盘厚 =20mm,在向径r1=100mm处有一直径d1=50mm的通孔,向径r2=200mm处有一重量为2N的重块,在向径r3=200处有一直径d3=50mm的通孔.为使圆盘达到静平衡,拟在向径r=200mm的圆周上再钻一通孔,试求此通孔的直径和方位.(钢的重度p=7.6×10-5N/mm3)
=20mm,在向径r1=100mm处有一直径d1=50mm的通孔,向径r2=200mm处有一重量为2N的重块,在向径r3=200处有一直径d3=50mm的通孔.为使圆盘达到静平衡,拟在向径r=200mm的圆周上再钻一通孔,试求此通孔的直径和方位.(钢的重度p=7.6×10-5N/mm3)
第2题
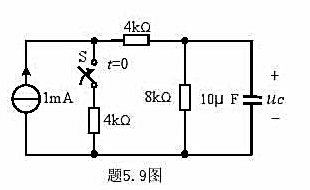
题5.9图所示电路中,换路前电路已处于稳态,求换路后uC(t)的零输入响应、零状态响应、暂态响应、稳态响应和完全响应。
第3题
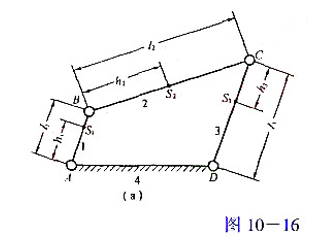
图10-16(a)所示铰链四杆机构中,已知构件1、2、3的长度为:l1=100mm,l2=300mm,l3=200mm;质量为:m1=1kg,m2=3kg、m3=2kg;其质心S1,S2,S3,的位置尺寸分别为:h1=75mm,h2=150mm,h3=120mm.今要求该机构达到惯性力完全平衡,试设计增加平衡质量的方案,并计算它们质径积的大小和方位.
第4题
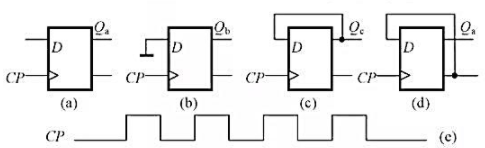
维持阻塞D触发器接成图题13-5(a)、(b)、(c)、(d)所示形式,设触发器的初始状态为0,试根据图(c)所示的CP波形画出Qa,Qb,Qc,Qd的波形。
第5题
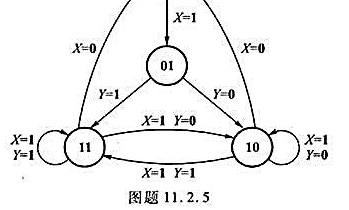
一个数字系统控制单元的状态图如图题11.2.5所示,试画出等效的ASM图(状态框是空的),并用D触发器和数据选择器实现控制单元电路。
第9题
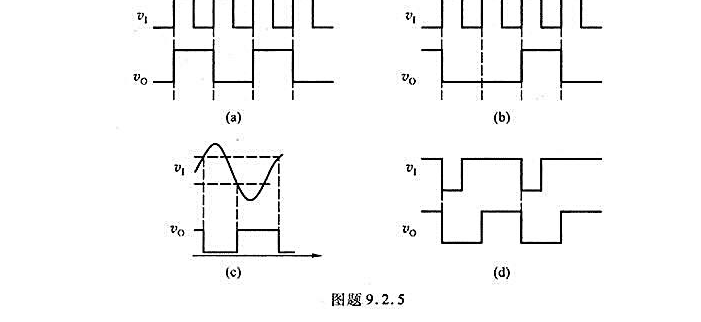
已知某些电路的输入、输出波形分别如图题9.2.5(a)、(b)、(c)、(d)所示,试问应选择哪些电路才能实现如图所示的输入、输出波形对应关系?
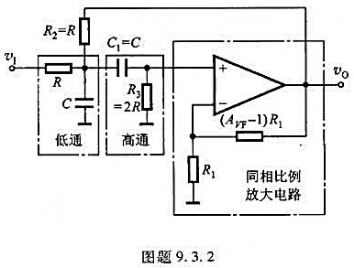
 试计算中心频率f0和带宽BW,画出其选频特性。
试计算中心频率f0和带宽BW,画出其选频特性。