题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
工业机器人基坐标也叫工具坐标()
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“工业机器人基坐标也叫工具坐标()”相关的问题
更多“工业机器人基坐标也叫工具坐标()”相关的问题
第2题
在R3中,己知向量a在基 下的坐标为
下的坐标为 ,向量β在基
,向量β在基 下的坐标为(0,-1,1)',求:
下的坐标为(0,-1,1)',求:
(1)由基 到基
到基 的过渡矩阵;
的过渡矩阵;
(2)向量a+β在基下的坐标。
第3题
设R[x]s的旧基为 新基
新基
(1)求由旧基到新基的过渡矩阵;
(2)求多项式 在B2下的坐标;
在B2下的坐标;
(3)若多项式f(x)在基B2下的坐标为(1,2,3,4,5)T,求它在基B1下的坐标.
第5题
第6题
设F上三维向量空间的线性变换σ关于基{α1,α2,α3}的矩阵是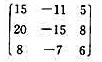 。求σ关于基
。求σ关于基
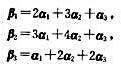
的矩阵。设ξ=2α1+α2-α3。求σ(ξ)关于基β1,β2,β3的坐标。
第7题
点M(x,y)的坐标满足|x+y|<|x-y|
(1)点M的坐标在第二、四象限
(2)点M的坐标在第三、四象限
A.条件(1)充分,但条件(2)不充分。
B.条件(2)充分,但条件(1)不充分。
C.条件(1)和(2)单独都不充分,但条件(1)和条件(2)联合起来充分。
D.条件(1)充分,条件(2)也充分。
E.条件(1)和(2)单独都不充分,条件(1)和条件(2)联合起来也不充分。
第8题
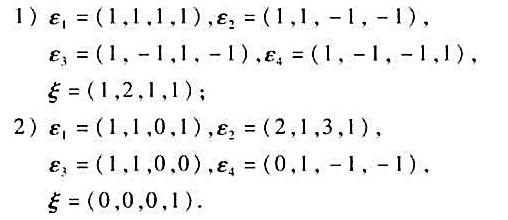
设R3中的两个基分别为:α1=(1,0,1)T,α2=(0,1,0)T,α3=(1,2,2)T和β1=(1,0,0)T,β2=(1,1,0)T,β3=(1,1,1)T。
(1)求由基α1,α2,α3到基β1,β2,β3的过渡矩阵。
(2)已知向量α在基α1,α2,α3下的坐标为(1,3,0)T,求α在基β1,β2,β3下的坐标。